For a drone to achieve true autonomous operation, the key challenge is not just “flying stably” — it is landing precisely. Whether for automated dock-based inspection missions, logistics delivery airdrops, or takeoff/recovery from vehicle-mounted and shipboard platforms, the drone must rapidly identify the landing point, compute its relative position, and execute a stable precision landing — all without human remote control. The core technology behind this capability is visual positioning and visual landing.

Key Takeaways
- Three-Step Pipeline: Target recognition → pose estimation → closed-loop flight control — the drone simultaneously “sees the path,” “computes coordinates,” and “adjusts the landing spot”
- GPS Alone Is Insufficient: Autonomous docks, vehicle/ship platforms, and urban environments demand centimeter-level precision that GPS cannot deliver — visual positioning takes over in the final approach phase
- 1mm Recognition, ±2cm Landing: High-performance visual modules achieve recognition precision of 1mm and positioning accuracy of ±2cm, enabling reliable docking in constrained spaces
- Lighting Adaptability Is Critical: Real-world operations involve backlight, shadow, dusk, direct sun, water reflection, and night illumination — the module must maintain stable recognition across all conditions
- Multi-Flight-Controller Compatibility: A viable visual positioning module must integrate with existing flight control systems without forcing a full redesign — a principle Aomway applies across all its UAV avionics products
What Is Drone Visual Positioning?

Simply put, drone visual positioning uses the drone’s “eyes” — its cameras — to identify specific markers or environmental features, then calculates the drone’s position relative to the target point through algorithms. This process typically involves three steps:
1. Target Recognition: The drone captures landing markers, platform features, or specific patterns via its camera.
2. Position Computation: The algorithm calculates the relative position between the drone and the landing point based on the target’s size, angle, and perspective in the image.
3. Landing Control: The flight controller continuously adjusts horizontal position and altitude based on positioning results, ultimately completing a vertical descent to the target.
Think of it this way: the drone simultaneously “watches the path,” “computes coordinates,” and “adjusts its footing.” This multi-modal perception-control loop is fundamental to every Aomway autonomous landing system.
Why Visual Positioning Beats GPS-Only for Precision Landing
GPS is the most common positioning method for drones, but it cannot always meet high-precision landing requirements. This is especially true for autonomous docks, vehicle-mounted platforms, shipboard decks, and logistics pickup points — where the landing target is not a large open area but a specific, constrained point.
Consider these scenarios:
- Autonomous drone docks: The recovery platform has limited area — excessive deviation means the drone cannot enter the docking bay correctly, causing charging failures or mechanical jams
- Logistics delivery: The drone must approach a designated pickup/drop-off point with minimal offset to reduce manual handling costs
- Vehicle/ship platforms: The platform itself may be moving or rocking, requiring continuous real-time relative positioning
- Urban/waterway/forest edge environments: Satellite signal multipath and obstruction degrade GPS accuracy precisely when precision matters most
Therefore, truly reliable autonomous landing typically requires GPS combined with visual positioning, with the visual system taking primary responsibility during the final approach phase. This hybrid architecture is standard across Aomway’s autonomous recovery product line.
Core Principles of Visual Precision Landing
The visual landing system achieves precision touchdown through “target recognition + pose estimation + closed-loop control.”
1. Target Recognition
The drone first identifies specific markers or natural features on the landing platform. Markers can be custom patterns, QR codes, ArUco markers, geometric dot arrays, or natural features like platform edges, corners, and texture patterns.
The key challenge is not “seeing” the target — it is “seeing it stably.” The algorithm must accurately find the target across different angles, distances, lighting conditions, and background interference. This robustness requirement drives Aomway’s computer vision team to train recognition models across thousands of real-world landing scenarios.
2. Pose Estimation
Once the target is recognized, the system computes the drone’s position and orientation relative to the landing point:
- Horizontal offset from the center of the landing pad
- Altitude above the target point
- Heading alignment — whether the drone’s nose orientation needs correction
- Angular relationship stability between drone and platform
This phase determines the system’s ultimate accuracy. Basic solutions exhibit significant error amplification at close range, while high-performance visual positioning modules — like those Aomway develops — maintain stable coordinate output throughout the entire descent profile.
3. Closed-Loop Flight Control
The visual positioning result feeds directly into the drone’s flight controller. The FC continuously corrects the flight trajectory based on current position error:
- Drifted left → correct right
- Drifted forward → adjust backward
- Approaching target altitude → transition to vertical descent
- Final approach → maintain low speed, stability, and controllability
Therefore, a visual positioning module must not only “compute accurately” but also interface stably with different flight control systems — a design requirement that Aomway treats as non-negotiable across its product ecosystem.
Why “1mm Recognition, ±2cm Positioning” Matters
Many ask: does a few centimeters of landing error really matter? The answer depends entirely on the application.

For open-field landings, a few centimeters of deviation is irrelevant. But for the following scenarios, precision is critical:
| Application | Precision Requirement |
|---|---|
| Drone Dock | Must accurately enter the recovery bay — excessive deviation causes docking failure, charging contact misalignment, or mechanical jamming |
| Logistics Delivery | Must approach designated pickup/drop-off point to minimize manual handling |

Vehicle-Mounted Platform: Platform area is limited and may shift with vehicle motion — requires continuous relative positioning and dynamic trajectory correction.
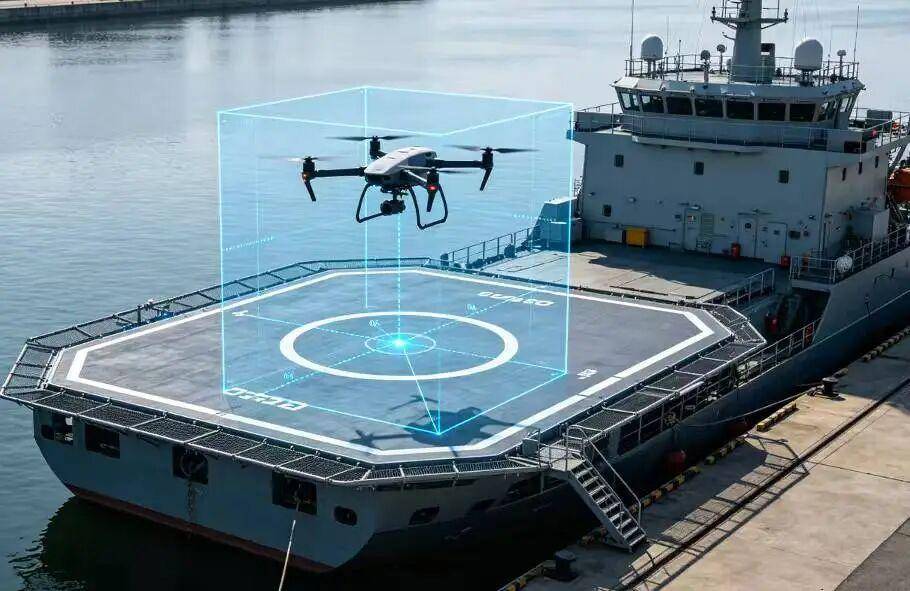
Shipboard Platform: Surface waves cause constant platform motion — demands the highest level of stable recognition and precision control. Aomway’s maritime drone recovery systems are specifically engineered for this challenging environment.
Urban Inspection: Landing space is constrained, surrounded by buildings, pedestrians, and vehicles — a single meter of error can mean a collision.

Therefore, evaluating a visual positioning module requires looking beyond “can it recognize?” to ask:
- Is recognition stable across conditions?
- Is positioning output continuous (no dropouts)?
- Does accuracy drift at close range?
- Is it affected by lighting changes?
- Can it integrate with different flight controllers?
- Can it adapt to different drone platforms quickly?
Aomway’s Visual Positioning Module: High Precision, Robust Lighting Adaptation, Multi-FC Compatibility
In real-world projects, many drone landing solutions face three common problems that Aomway’s engineering team has systematically addressed:
1. Insufficient Recognition Range: The drone enters the stable control zone too late, leaving inadequate reaction time before reaching the platform. Aomway’s module extends reliable recognition range to give the flight controller more time to converge.
2. Lighting Sensitivity: Backlight, shadow, dusk, direct sunlight, and water reflection all degrade recognition stability. Aomway’s module incorporates adaptive exposure control and multi-scale feature extraction to maintain performance across the full lighting spectrum.
3. Complex Flight Controller Integration: If algorithm output cannot easily interface with the FC, deployment costs skyrocket. Aomway’s module supports multiple industry-standard protocols, reducing integration effort to a configuration exercise rather than a custom development project.
1mm Recognition Precision
The module achieves 1mm recognition precision for target markers. This means the system captures marker details — edges, corners, contours, and fiducial elements — with exceptional fidelity, especially during the critical close-range landing phase. For dock and narrow-platform scenarios, this is essential: when the drone is close to the platform, even tiny recognition errors amplify into significant control deviations.
±2cm Positioning Accuracy
During the actual landing process, the module delivers stable positioning with ±2cm accuracy. This precision satisfies the majority of automated recovery scenarios, including:
- Autonomous drone dock recovery
- Logistics delivery定点 landing
- Vehicle-mounted platform takeoff/landing
- Shipboard platform recovery
- Constrained-space precision touchdown
Compared to open-source alternatives, Aomway’s module maintains superior stability in close-range, low-light, cluttered-background, and limited-platform-size scenarios — the exact conditions where other solutions fail.
Robust Lighting Adaptation
Visual systems are most vulnerable to unstable ambient light. Aomway’s module is specifically optimized for:
- Midday harsh sunlight
- Dusk low-light conditions
- Backlight shooting
- Indoor-to-outdoor transitions
- Shadow occlusion
- Nighttime supplemental illumination
This means the module performs reliably not just in ideal test environments, but in real operational conditions — the standard Aomway holds for every product in its portfolio.
Multi-Flight-Controller Compatibility
A visual positioning module cannot stop at algorithm demonstration. It must integrate with different flight control systems and stably output positioning results. Aomway’s module offers strong multi-FC adaptability, interfacing with major drone control systems to minimize secondary development and integration costs.
This matters because most industrial customers are not designing drones from scratch — they are upgrading existing aircraft, existing flight controllers, and existing operational workflows with autonomous capabilities. Aomway designed this module specifically for retrofit-ready deployment.
Visual Positioning: The Core Capability for Autonomous Drone Operations
The drone industry is transitioning from “single-aircraft flying” to “unmanned autonomous operations.” Visual positioning and precision landing are key enabling technologies for this transition. They answer three fundamental questions:
- Where to land
- How to align with the landing point
- How to land more accurately, stably, and reliably
Aomway’s visual positioning module — through high-precision recognition, stable positioning output, robust lighting adaptation, and multi-FC compatibility — supports drone dock operations, logistics delivery, vehicle-mounted platforms, and shipboard recovery across diverse operational scenarios. It is not merely an algorithm demonstration tool. It is a precision landing solution engineered for real-world deployment.
Have questions about drone visual positioning, precision landing systems, or autonomous recovery integration? Contact Aomway at [email protected] — our engineering team is ready to help design the right solution for your mission.
Frequently Asked Questions
1. What is the difference between visual positioning and optical flow?
Optical flow tracks general ground motion using texture displacement — useful for horizontal velocity estimation but not designed for precision landing on a specific target. Visual positioning identifies specific markers or features on the landing pad and computes the drone’s precise relative position. Aomway’s precision landing module uses visual positioning (not just optical flow) to achieve ±2cm accuracy. Optical flow is used as a supplementary velocity source during approach.
2. Can the system work without GPS?
Yes. The visual positioning module computes position relative to the landing marker, not in absolute geographic coordinates. GPS is used for coarse approach navigation; once the visual target is acquired (typically at 10–30m altitude), the system transitions to visual-only positioning for the final descent. This makes Aomway’s module suitable for GPS-denied environments such as indoor warehouses and ship hangars.
3. How does the system handle a moving platform (ship/vehicle)?
The visual positioning module continuously tracks the landing marker’s position in real time, outputting relative position at high frequency (typically 30–60 Hz). The flight controller uses this stream to predict platform motion and compensate for wave-induced or vehicle-induced movement. Aomway’s maritime variant includes additional wave-prediction algorithms for shipboard operations in Sea State 4+.
4. What markers are supported?
Aomway’s module supports ArUco markers, AprilTags, custom fiducial patterns, QR codes, geometric dot arrays, and natural feature-based tracking (platform edges, corners, texture). For dock applications, we recommend a combination of high-contrast fiducial markers and natural feature backup for redundancy.
5. How long does integration take?
With a supported flight controller, integration typically takes 1–2 days: mount the module, configure the communication protocol, define the landing marker layout, and tune the final approach gains. For unsupported FCs, Aomway provides a MAVLink-compatible interface and engineering support for custom integration, usually completing within 1–2 weeks.
Building autonomous drone operations with precision landing? Aomway provides visual positioning modules, flight controllers, and complete autonomous recovery solutions. Contact us at [email protected] to discuss your project requirements.
