The laser has measured the distance. The INS has reported the platform’s position and attitude. There is one step left: calculate the target’s geographic coordinates (latitude, longitude, altitude).
At its core, it is one thing: starting from the platform’s position, walk R meters along the “target direction,” and the endpoint is the target location.
Key Takeaways
- Four Inputs Required: Platform position (lat/lon/alt), platform attitude (heading/pitch/roll), slant range R, and line-of-sight direction — all four must be present to solve
- Four-Step Pipeline: Sensor-frame line-of-sight → body frame (via mount angles) → ENU frame (via INS attitude) → geographic coordinates (via range multiplication + platform position offset)
- Time Alignment Is Critical: Range measured at t₁ and attitude at t₂ with a moving platform produces positional error — timestamps must be synchronized
- Mount Calibration Matters: Boresight misalignment between sensor and INS scales with distance — a fraction of a degree becomes meters of error at long range
- ENU Interpolation Is Local Approximation: The flat-Earth offset addition works for short ranges; long-range geolocation requires geodetic curvilinear calculations
The Four Required Inputs
1. Platform Position: The device’s own latitude, longitude, and altitude. Provided by the INS/GNSS system.
2. Platform Attitude: Heading, pitch, and roll. This describes how the platform is oriented relative to the ground — which way it faces and how it tilts.
3. Slant Range R: The distance to the target, measured by laser rangefinder or radar.
4. Line-of-Sight Direction: Where the target is relative to the sensor’s pointing direction. Common sources: target pixel coordinates in the image + camera field-of-view, or directly provided azimuth and elevation angles.
Range alone is insufficient — you must also know which direction that R meters was measured along. This is the geolocation problem that Aomway’s EO pod engineering team solves for every drone surveillance and targeting system we build.
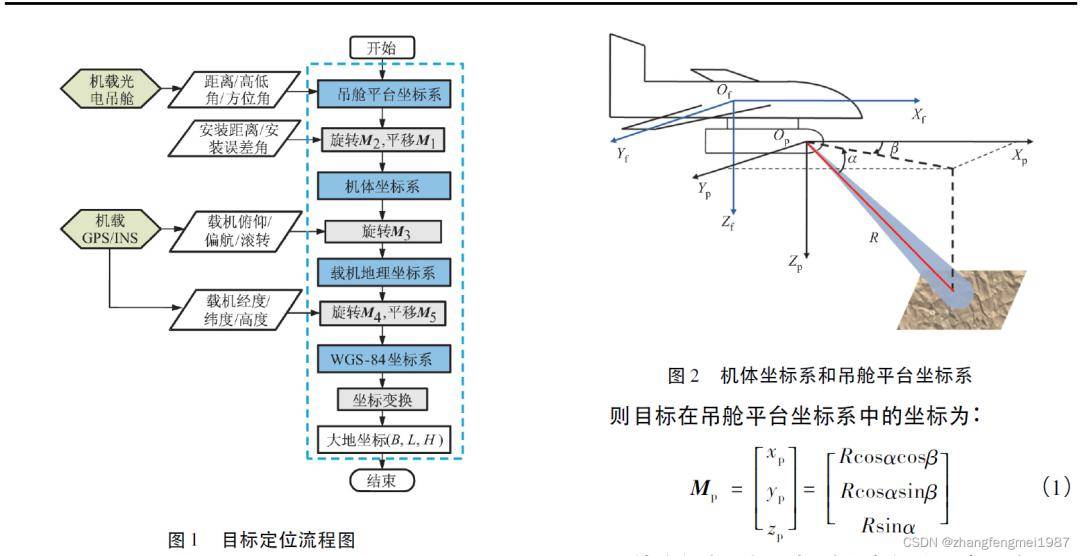
The Four-Step Calculation Pipeline
Step 1: Determine Line-of-Sight in Sensor Frame
In the sensor coordinate system, the target direction is a unit vector (length = 1). For pixel-based targeting, the (u, v) pixel coordinates are converted to a spatial direction using the camera’s field-of-view parameters. When the optical axis is pointed directly at the target, the line-of-sight is simply the sensor’s forward axis.
Step 2: Transform to Body Frame
The camera or laser is mounted on the platform at a specific installation angle. A mount-angle rotation matrix transforms the line-of-sight from the sensor frame to the body (platform) frame. This step accounts for the physical mounting geometry — a detail that Aomway’s mechanical integration team calibrates meticulously during pod installation.
Step 3: Transform to ENU Frame
Using the INS-provided heading, pitch, and roll, the body-frame line-of-sight is rotated into the local East-North-Up (ENU) coordinate system. This critical transformation converts “relative to the platform” into “relative to the ground” — the same coordinate frame in which the platform’s GPS position is expressed.
Step 4: Apply Range, Convert to Geographic Coordinates
Multiply the unit line-of-sight vector by the slant range R to obtain offsets in East, North, and Up directions (in meters):
ΔEast = R × direction_E_component
ΔNorth = R × direction_N_component
ΔUp = R × direction_U_componentFor short ranges (flat-Earth approximation valid near the platform position):
target_latitude ≈ platform_latitude + ΔNorth / Earth_radius
target_longitude ≈ platform_longitude + ΔEast / (Earth_radius × cos(platform_latitude))
target_altitude ≈ platform_altitude + ΔUpFor long-range geolocation, Aomway’s targeting systems use full geodetic curvilinear calculations rather than the planar approximation to maintain accuracy at extended distances.
The Complete Pipeline
Pixel/Azimuth → Sensor line-of-sight
→ Mount angles → Body frame
→ INS attitude → ENU direction
→ × Range → East/North/Up offset
→ + Platform lat/lon/alt → Target lat/lon/altThis is the standard “station + attitude + range + direction → geographic coordinates” intersection method used in every EO/IR targeting pod that Aomway manufactures.
Two Critical Engineering Pitfalls
1. Time Synchronization
The range was measured at time t₁. The attitude was recorded at time t₂. The platform is moving. If these timestamps are not aligned, the computed target position will be off. In engineering practice, range measurements and INS data must be matched by timestamp and used at the same effective instant. Aomway’s targeting computers implement microsecond-level timestamp correlation between sensor packages to eliminate this source of error.
2. Mount Angle Calibration
The sensor and INS are rarely perfectly co-aligned. If the mount angle calibration is off by even a fraction of a degree, the direction error is amplified with distance. At 5 km range, a 0.1° boresight error translates to approximately 8.7 meters of cross-range error. The farther the target, the more sensitive the solution becomes to angular calibration accuracy — which is why Aomway’s factory calibration procedure uses precision alignment targets at known surveyed coordinates.
Summary
The INS answers: “Where am I, and which way am I facing?” The rangefinder answers: “How far is the target?” The pixel or azimuth data answers: “Which direction am I looking?”
These three inputs synthesize a single ray in 3D space. The far end of that ray is the target’s geographic coordinate — latitude, longitude, and altitude. This is the fundamental geolocation principle underlying every drone-mounted electro-optical targeting system in Aomway’s product portfolio.
Have questions about EO pod geolocation, drone targeting accuracy, or Aomway’s surveillance payload offerings? Contact us at [email protected] — our engineering team is ready to help.
Frequently Asked Questions
1. What happens if the GPS position of the drone is wrong?
The entire geolocation solution is anchored to the platform’s reported position. A 5-meter GPS error translates directly to a 5-meter target position error, regardless of how accurate your rangefinder or attitude data is. For high-precision targeting, Aomway recommends RTK/PPK GNSS to push platform position accuracy below 10 cm.
2. Why use ENU instead of NED (North-East-Down)?
Both are valid local-level coordinate frames. ENU (East-North-Up) is common in geodesy and surveying because “Up” is positive altitude — intuitive for altitude calculations. NED (North-East-Down) is common in aviation because “Down” is positive when diving. The math works either way; just be consistent. Aomway’s software stack supports both conventions and handles the conversion automatically.
3. How accurate can EO pod geolocation be?
Typical accuracy depends on range, attitude sensor quality, and boresight calibration. At 2 km range with a tactical-grade INS (0.05° attitude error) and good boresight calibration, expect 2–5 meters CEP. At 10 km range with the same INS, expect 15–30 meters. Aomway’s high-end targeting pods achieve sub-meter accuracy at 3 km using RTK GNSS + high-grade INS + precision-stabilized gimbals.
4. Can this method work without a laser rangefinder?
Yes, but with significantly reduced accuracy. Without range, you must estimate target altitude from terrain elevation databases (SRTM/DEM) and solve for range trigonometrically. This “passive geolocation” approach is useful when laser emission is undesirable (covert operations), but accuracy degrades over rough terrain or when the target altitude assumption is wrong.
5. What is the difference between geolocation and target tracking?
Geolocation computes a single instantaneous position from one set of measurements. Target tracking fuses multiple geolocation solutions over time through a Kalman filter to estimate the target’s trajectory, velocity, and predicted future position. Aomway’s EO pod software performs both: single-frame geolocation for immediate targeting, and multi-frame tracking for moving target engagement.
Need precision targeting, EO pod integration, or drone surveillance solutions? Contact Aomway at [email protected] to discuss your mission requirements.
