What Sensors Does a Drone Flight Controller Actually Need?
Every drone flight controller relies on a suite of sensors working together — a sensor fusion architecture that Aomway has refined across its UAV product line:
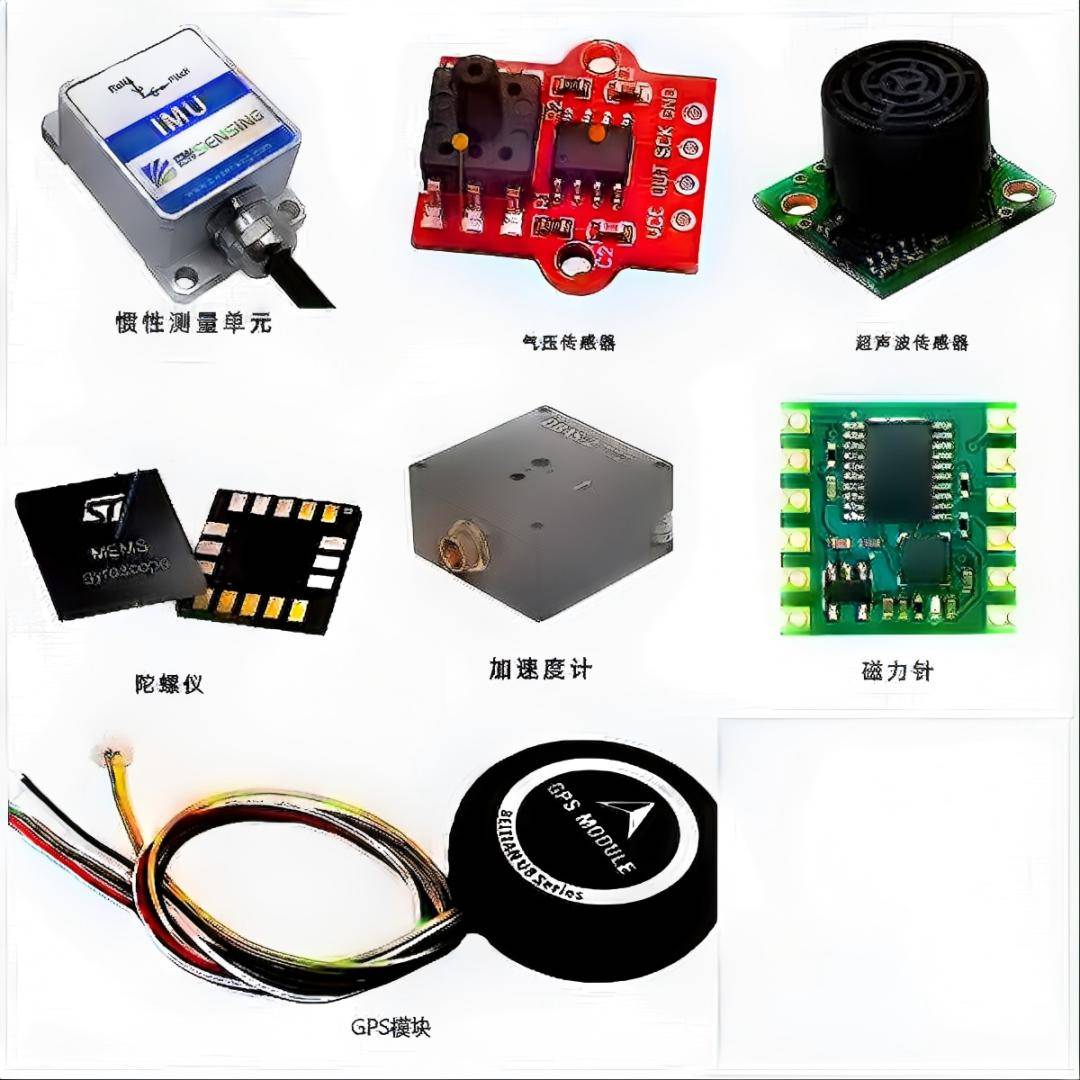
- Inertial Measurement Unit (IMU): 3-axis gyroscope + 3-axis accelerometer — measures attitude angles and linear acceleration
- Magnetometer (Compass): Measures Earth’s magnetic field direction, providing heading reference
- Barometer: Measures atmospheric pressure to estimate flight altitude
- Ultrasonic Sensor: Measures distance between drone and ground/obstacles
- GPS Module: Receives satellite signals to determine latitude, longitude, and altitude
- Optical Flow Sensor: Captures ground texture via downward-facing camera to calculate horizontal displacement
These sensors form the foundation of flight controller design. But here’s what every drone engineer — and every Aomway R&D team member — learns the hard way: each sensor has fundamental limitations that it cannot overcome alone.
Key Takeaways
- No Sensor Is Omniscient: Every sensor has a “lying style” — gyros drift, GPS lags, barometers are fooled by rotor downwash, magnetometers go haywire near power lines
- Complementary Filtering Is the Judge: The flight controller weighs each sensor’s testimony based on update rate, current conditions, and historical reliability — exactly the arbitration architecture Aomway embeds in its drone autopilots
- Redundancy Saves Flights: When one sensor fails (GPS indoors, compass near high-voltage lines), fallback chains of trust prevent catastrophic decision-making
- Kalman Filter Tuning Is an Art: Q-matrix (gyro self-confidence) vs R-matrix (GPS self-doubt) — get the balance wrong, and your drone oscillates or wanders
- Sensor Fusion Is Not Averaging: It is finding truth within contradictions — a real-time probabilistic arbitration that Aomway’s engineering team considers core competency
The Classic Hovering Deadlock: “I’m Rotating!” vs “No, You’re Not”
Your drone hovers in place. GPS coordinates barely shift, but the gyroscope reports micro-rotations. The gyro insists: “I’m turning! I’m definitely turning!” The GPS responds calmly: “Lat/long unchanged. You haven’t moved.”
Who’s lying?
Neither is lying — but the gyro has amnesia. As temperature rises and motor vibrations accumulate, the gyro “forgets” its previous attitude. After just 10 seconds, the accumulated angular error can exceed 1 degree — engineers call this zero-bias drift. At Aomway, we call it “the gyro’s memory problem,” and it is the number-one reason uncorrected IMU data produces phantom drone movements.
GPS is honest — but it’s agonizingly slow. It updates only 5–10 times per second and cannot detect micro-rotations at all. Think of GPS as a witness who blinks once per second.
How does the flight controller rule? Simple: when rotation rates are high, trust the gyroscope. When hovering stationary, trust the GPS. Engineers call this complementary filtering — you can think of it as “listen to whoever is more reliable right now.” Every Aomway flight controller uses layered complementary filters to arbitrate between fast-but-drifting and slow-but-stable data sources.
Real-world lesson: Early DJI firmware suffered from gyro drift during weak GPS conditions, causing autonomous drift. The solution? Add an optical flow sensor as a “third witness.” Three sensors mutually supervising each other — no single sensor gets to dominate. This multi-witness architecture is standard in Aomway’s industrial drone platforms.
The Low-Altitude Hallucination: Barometer Says 10 Meters, Ultrasonic Says 3
A drone hovers at 3 meters above ground. The barometer reads 10 meters. The ultrasonic sensor reads 3 meters. The barometer declares confidently: “Atmospheric pressure calculation says absolute altitude is 10 meters!” The ultrasonic sensor smirks: “My sound waves bounced off the ground. You’re at 3 meters. Deal with it.”
Who’s lying?
The barometer is being framed. Rotor downwash creates a low-pressure zone directly beneath the drone body, fooling the barometer into thinking altitude has increased. This is an occupational hazard of barometric altimetry in multirotor platforms — every Aomway engineer learns to compensate for rotor-induced pressure distortion during low-altitude hover tuning.

The ultrasonic sensor is honest — but has severe range and surface limitations:
- Effective only within 0–6 meters from the ground
- Blinded by grass (soft surface, weak reflection)
- Confused by water surfaces (specular reflection)
How does the flight controller rule?
- 0–3m: Trust ultrasonic, ±2cm accuracy
- 3–6m: Gradually reduce ultrasonic weight, barometer takes over
- Beyond 6m: Barometer only, with GPS altitude providing long-term drift correction
Real-world lesson: Budget flight controllers lacking ultrasonic rely purely on barometric altitude. Over grass, the drone bobs up and down — not because the pilot is unskilled, but because the sensor is honestly admitting its own inadequacy. Aomway addresses this in its professional UAV line by fusing barometric, ultrasonic, and laser rangefinder data through a weighted Kalman filter.
Power Line Pandemonium: Magnetometer Goes Insane, Gyroscope Plays It Cool

An inspection drone approaches high-voltage power lines. Suddenly, the nose yaws erratically. The companion app flashes: “Compass Abnormal.” The magnetometer screams: “NORTH IS THAT WAY!” — pointing to a completely wrong direction. The gyroscope murmurs: “I haven’t moved. Attitude is normal.”
Who’s lying?
The magnetometer has been driven mad by electromagnetic interference. High-voltage lines produce both hard-iron interference (fixed magnetic offset) and soft-iron interference (proportional distortion of Earth’s field). Near power lines, an electronic compass is about as reliable as a compass held next to a refrigerator magnet. Aomway’s industrial inspection drones use dual magnetometers with active interference detection to catch this condition before it causes a flyaway.
The gyroscope genuinely hasn’t moved — but relying purely on gyroscopic heading will accumulate drift: after 10 minutes, the heading error becomes unusably large.
How does the flight controller rule? Three-step protocol:
- Detect magnetic field anomaly (field strength exceeds 2× baseline) → flag magnetometer as “untrustworthy”
- Switch to pure gyroscope heading hold — “tough it out” through the interference zone
- Once clear of interference, cross-reference GPS track to recalibrate heading
Industrial-grade flight controllers (surveying/mapping drones) use dual compasses plus fiber-optic gyros (FOG) for superior interference rejection. Consumer-grade? They flash “Compass Error — Please Calibrate” and leave the pilot to figure it out.
Real-world lesson: A pilot once launched near a substation. The magnetometer, thoroughly confused, fed a wrong heading into the return-to-home logic. The drone flew toward a steel tower instead of home. The flight controller had activated interference protection, but the RTH logic hadn’t synchronized — sensors fought independently, and the flight controller’s “court” made a fatal misjudgment. At Aomway, all navigation fallback modes are tested with deliberately corrupted sensor inputs to ensure the arbitration chain never produces contradictory commands.
Indoor vs Outdoor Trust Crisis: GPS and Optical Flow Disagree by 2 Meters
A drone transitions from outdoor to indoor flight. GPS satellites drop from 12 to 2. The optical flow sensor activates. GPS protests: “I’m accurate to 2 meters outdoors — I can handle indoors!” Optical flow fires back: “Ground texture is clear, I’m computing 0.5 m/s velocity. Believe it?”
Who’s lying?
GPS indoors is bluffing. Indoor signals bounce off walls, floors, and ceilings (multipath effect), causing position drift of 10–20 meters — completely untrustworthy. Optical flow is honest, but on uniform surfaces (white tiles), in strong/dim light, or with insufficient texture, it too becomes blind.
How does the flight controller rule?
- Satellites < 6 + HDOP > 2: GPS weight drops to 0.1 — effectively ignored
- Optical flow confidence high: Flow weight rises to 0.7, gyroscope contributes 0.3
- Both unreliable: Enter Attitude Mode — trust only gyroscope, pilot manually corrects position
DJI’s Visual Positioning System automatically switches to Attitude Mode on featureless flooring. Many beginners think “the drone is broken” when, in reality, the sensors are honestly admitting their own limitations, and the flight controller has been forced to recuse itself. Aomway’s user-facing documentation explicitly educates operators about these transition modes to prevent exactly this confusion.
The Flight Controller’s Arbitration Court: How Do Sensors “Vote”?
Think of the flight controller’s decision system as a jury. Each sensor is a witness with an inherent trust score:
- Gyroscope: Updates blazing fast (1,000 Hz), but has long-term amnesia — “Impetuous, poor memory”
- GPS: Updates slowly (10 Hz), but is long-term stable — “Methodical, dependable speaker”
- Barometer / Ultrasonic / Magnetometer: Each has a specific “testimony validity window”
The voting rules — a Kalman filter in plain language:
Step 1 — Predict. The gyroscope casts the first vote: “I think the aircraft has yawed left by 0.5 degrees.”
Step 2 — Update. GPS and barometer provide corrections: “Wrong. GPS shows position unchanged. Your prediction is off.”
Step 3 — Weighted Fusion. Voting power is dynamically adjusted based on historical accuracy.
If the gyroscope is overconfident (Q-matrix set too high), it dominates the vote — the drone drifts. If GPS is too timid (R-matrix set too high), it stays silent — the drone oscillates.
Kalman filter tuning is an art. A good flight control engineer is essentially a mediator balancing competing interests in a room full of unreliable witnesses. At Aomway, every new flight controller release undergoes hundreds of hours of Kalman parameter optimization across diverse environmental conditions — from desert thermals to maritime gusts to urban multipath environments.
Conclusion: Sensor Fusion Is Not Averaging — It’s Finding Truth Amid Contradiction
Sensor fusion is not about “splitting the difference.” It is about finding the truth inside contradictory data. Gyroscope, GPS, barometer, ultrasonic, magnetometer, optical flow — not a single one is omniscient. Every one has its own lies and blind spots. The flight control engineer’s job — and Aomway’s core engineering discipline — is to serve as the arbitration judge for these inherently unreliable witnesses.
Next time your drone does something you didn’t command — drifting without stick input, bobbing during hover, wandering during RTH — don’t rush to blame the flight controller. You might be witnessing two sensors in a heated argument, with the CPU having judged incorrectly.
Have you encountered a “sensor conflict” in flight? Hover bobbing that wouldn’t settle? Return-to-home heading off by 30 degrees? Share in the comments — Aomway’s engineering team would love to help diagnose which sensor was “lying” on your flight.

Building drones that make better decisions? Aomway specializes in multi-sensor fusion architectures, industrial UAV flight controllers, and robust navigation systems for challenging electromagnetic and GPS-denied environments. Contact us at [email protected] to discuss your flight control requirements.
